
一、悟空™光学动捕系统
1.1、概述
光学动作捕捉依靠一整套精密而复杂的光学摄像头来实现,它通过计算机视觉原理,由多个高速摄像机从不同角度对目标特征点进行跟踪来完成全身的动作的捕捉。
光学动捕系统是一种用于准确测量物体(刚体)在室内三维空间运动信息的设备。具有高精度的室内定位能力,能够给室内小车、无人机、机器人、机械手臂等智能体提供高精度的空间位置信息。
1.2、工作原理
1)精准记录运动信息,基于计算机视觉原理,光学室内定位系统通过布置在空间中的多个红外摄像机捕捉区域内物体上反光标识点的运动信息,并以图像的形式记录下来。
2)实时解算六自由度位姿,利用计算机对捕捉到的图像数据进行处理,实时地解算出运动物体的六自由度位姿,即三自由度位置(X,Y, Z坐标)和三自由度姿态(俯仰角,偏航角和滚转角)。该系统也可以称为“室内定位系统”或“室内GPS”。
3)多架相机支持,覆盖范围广,光学室内定位系统采用智能相机,将反光球图像坐标传到主机,不同相机数目将产生不同的覆盖范围,相机越多,覆盖范围越大。


1.3 、悟空™光学动捕系统
悟空™光学动捕系统是基于光学惯性融合技术的高精度、高可靠性动作捕捉系统。悟空™不仅可以提供传统光学动作捕捉系统所能提供的6DoF、亚毫米级实时空间动捕数据。

1.3.1、悟空™光学动捕系统硬件参数
名称:悟空™光学动捕相机
型号:Goku-130
像素:130万
定位精度:0.1mm
延时采集数据:4ms,预测<1ms
最高工作帧数:260fps
视场角:84°x68°
供电方式:POE
追踪距离:10米(被动光标记点)、14米(主动光标记点)
内置高性能视觉追踪SoC芯片

反光标记球

T型标定杆辅助运动捕捉系统的校准

L型标定直角辅助运动捕捉系统中心点配置
优势:
亚毫米级精度:基于专用的SoC芯片和高效三维重建引擎,每一帧动作的捕捉精度都可以达到0.1毫米级精度;
多种标记点配置:Goku™支持被动标记点、主动标记点、全局时码同步标记点的系统配置,方便使用和运维;
易于部署:数据、供电、同步只需共用一根RJ45网线,部署简单;
极低系统延时:得益于Goku™的超高采样率,光学系统延时<4ms,光惯融合模式延时更低至1ms*;
支持光惯融合:可以提供6自由度、高精度、高可靠性、高采样率的空间捕捉数据。
1.3.2、悟空™光学动捕系统软件参数
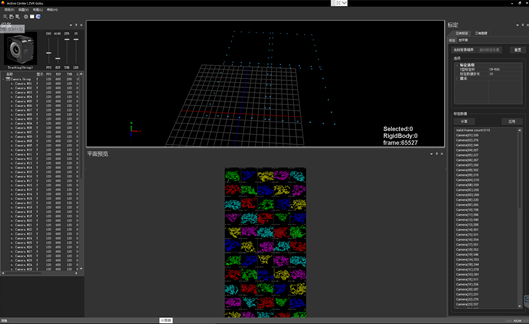
室内定位软件基于计算机视觉原理,通过布置在空间中的多个红外摄像机,将捕捉区域内物体上反光标识点的运动信息以图像的形式记录下来,然后对该图像数据进行处理,实时地解算出运动物体的六自由度位置和姿态。室内图像定位软件可实时和准确地解算捕捉区域内单个或多个刚体的六自由度位置和姿态,可为各类型的无人机和地面小车、机器人、机器狗、机械手臂等运动体的控制提供六自由度姿态和位置的准确测量信息。
1、基础功能
1)支持中文的多语言、多视角、多窗口3D显示操作界面
2)可同时对多达数百台Goku™ Camera进行集中管理
3)对视觉惯性同步控制器进行管理
4)高效实时视觉三维重建引擎
5)光学惯性深度融合引擎*
6)多达数百个智能光学刚体创建、标定、管理
7)实时物体追踪解算及绘制
8)数据记录及回放
9)空间捕捉区域实时测算及绘制
10)国际领先的IK算法*
11)实时数据流输出
12)数据记录及回放
*仅在惯性系统部署时应用
2、系统标定
1)内置ZVR Calib高效多目视觉标定算法,使用T型工具进行高精度自动标定
2)使用L型工具进行地平面标定
3)Goku™ Tracker视觉惯性内参及外参自动标定
3、支持数据格式
•RAW
•BVH
•C3D
•FBX
•OpenVR
•VRPN
•TCP/UDP Streaming
4、丰富的第三方接口
1.4、悟空™光学动捕系统用途举例
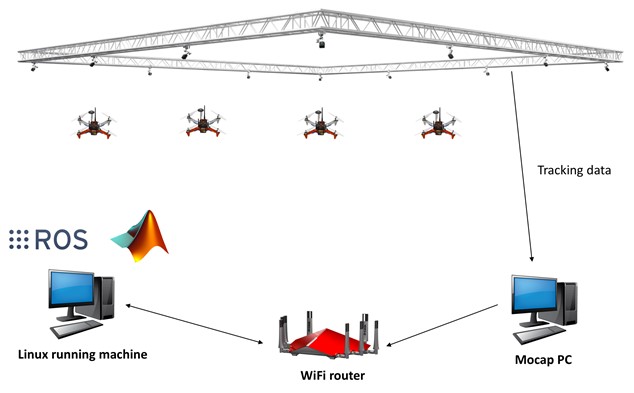
1.4.1、做为编队的测量基准
在对无人机、无人车等智能体进行高精度编队时,工程师需要构建一个空间测量基准,该基准可以实时精确测量每个智能体在空间中的位置和姿态,并通过运行有控制软件(如ROS)的计算机下达编队指令。
推荐系统流程设置
1)使用Goku™ 130作为动作捕捉系统
2)针对场地面积和形状对Goku™ 130矩阵进行部署规划
3)使用标定工具对Goku™ 130矩阵进行校准并对齐地平面
4)如果智能体无法提供额外供电,系统可以采用被动标记点模式;如果智能体可以提供额外供电,推荐使用主动标记点模式
5)为每个智能体部署一个唯一的标记点刚体组合
6)在Active Center中注册所有智能体
7)将Active Center的输出数据流设置为UDP或VRPN模式
8)在ROS系统中导入Active Center的ROS接口包
9)读取并测试每个智能体的6自由度数据
10)开发编队程序,并在Matlab中进行仿真
11)进行实机测试,根据Goku™的实时数据驱动智能体编队
1.4.2、提升飞控系统开发效率
在对无人机飞行控制系统进行开发时,工程师需要对空中悬停、飞行中避障、机身姿态控制、着陆等功能进行开发和测试,因此工程师需要一把工作在三维空间中的尺子,实时对无人机在空间中的高度、位置、姿态、抖动、延时等指标进行测量,以提升开发效率。
推荐系统流程设置
1)使用Goku™ 130作为动作捕捉系统
2)在实机测试实验室中部署Goku™ 130,使测试面积被Goku™ 130完全覆盖
3)使用标定工具对Goku™ 130矩阵进行校准并对齐地平面
4)如果无人机无法提供额外供电,系统可以采用被动标记点模式;如果无人机可以提供额外供电,推荐使用主动标记点模式
5)为待测试的无人机规划标记点刚体
6)在Active Center中注册无人机所对应的刚体
7)将Active Center的输出数据流设置为UDP或VRPN模式
8)在Matlab中导入Active Center的Matlab接口包
9)在Matlab中读取无人机的实时位姿并绘制曲线
10)将数据导入飞控中的滤波器优化参数
11)在待避障物体和着陆点上方式被动标记点并规划、注册刚体
12)验证无人机在避障和着陆时的速度、角度、测距、机身姿态等指标与程序设计是否一致。
1.4.3、辅助机械臂、运动力学开发
为了让机械臂的触手可以到达在空间中给定的位置并抓取得物体,工程师需要根据该位置和机械臂的初始状态给出机械臂的反向运动学解答,并通过动作捕捉系统实时追踪机械臂上每个节点在空间中的运动姿态,以衡量算法是否准确,执行是否存在误差。
典型应用场景
1)在机械臂和被追踪目标上部署标记点
2)使用Active Center对机械臂和被追踪目标进行刚体注册
3)利用机械臂上的摄像头和机械臂的运动系统完成机械臂的头手标定,并使用Goku验证头手标定结果
4)将Active Center数据通过C++接口导入机械臂的数据处理引擎
5)使用EKF滤波器对视觉和AHRS数据进行处理
6)根据被追踪目标和EKF滤波器控制机械臂运动
7)使用Goku追踪机械臂和被追踪目标的运动
8)将Goku数据作为基准绘制运动路径
9)分析运动结果,优化模型参数