猫头鹰OWL mini3
了解更多
OWL VISIM无人机算法模拟仿真器
猫头鹰mini3(蜂群版)
空地协同无人机&无人车
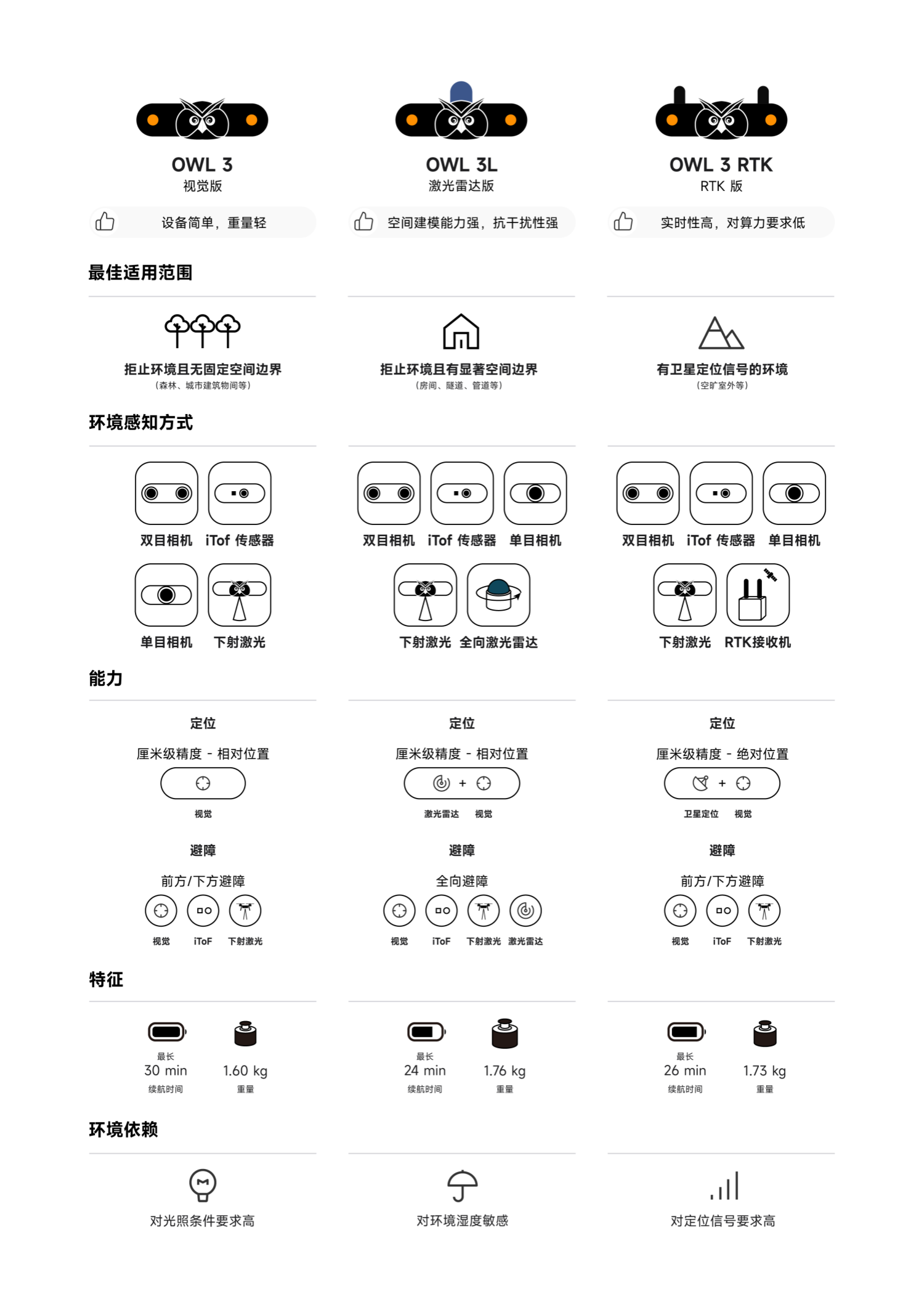
猫头鹰OWL 3
GNSS-TP100 高精度多模卫星导航综合教学实验系统
VIL100 无人机半实物仿真教学实验平台
INS-TP100惯性导航教学实验平台
HT-AXIS 刚体陀螺仪教学实验系统
TX100 无人机通信原理教学实验系统
HT380-E 无人机组装调试实训套件
ZT100 无人机装调飞测一体化实训操作平台
HT380 教学拆装调无人机实训平台
HT450 小型飞行训练无人机实训平台
HT600 六旋翼教学无人机飞行平台
HT500无人机实训平台
HT500Z 教学无人机机械抓取平台
HT-BY200 无人机蜂群表演编队
HT-BY100 球形编队集群表演无人机
F165 无人机集群编队表演套装
HT-FMS 全任务智能无人机仿真平台
GZ100 无人机故障检修实训系统
YL100 多旋翼无人机原理示教平台
WX100 无人机零部件维修测试平台
TS100 无人机综合调试与检测实训平台
HT-Z2 小型植保无人机竞赛实训平台
HT-Z30 植保教学无人机实训平台
HT-Z50 植保教学无人机实训平台
HT-X8 大载重物流运输飞行平台
HT-WL16 大载重中型六旋翼物流无人机开发平台
HT1600 四类中型六旋翼无人机考训平台
HT1000X6 小型六旋翼无人机电子执照考试平台
HT1000X8 小型八旋翼无人机电子执照考试平台
U-RTK 无人机电子执照考试监测系统
HT-DT100 无人机动力系统测试实训平台
无人机数字孪生实验室平台
无人机实验室资产管理系统
无人机专业教学智能管理系统
HT-FLYP 无人机场地飞行道具
HT-Charger 无人机智能电池管理系统
HT-JGB 无人机激光打靶器
HT-Flight Zone 无人机飞行安全防护场地
HT-ToolBox 无人机组装维修工具套件
应急侦察无人机智能识别系统
智慧园区全息安防无人机方案
城市精细化管理无人机应用平台
河道生态智能巡检无人机系统
森林防火慧眼无人机解决方案
智能体专用光学动作捕捉系统
无人机课程资源包
职业院校无人机教学专用教材
SP01 低空经济实训室及应用场景沙盘