前沿
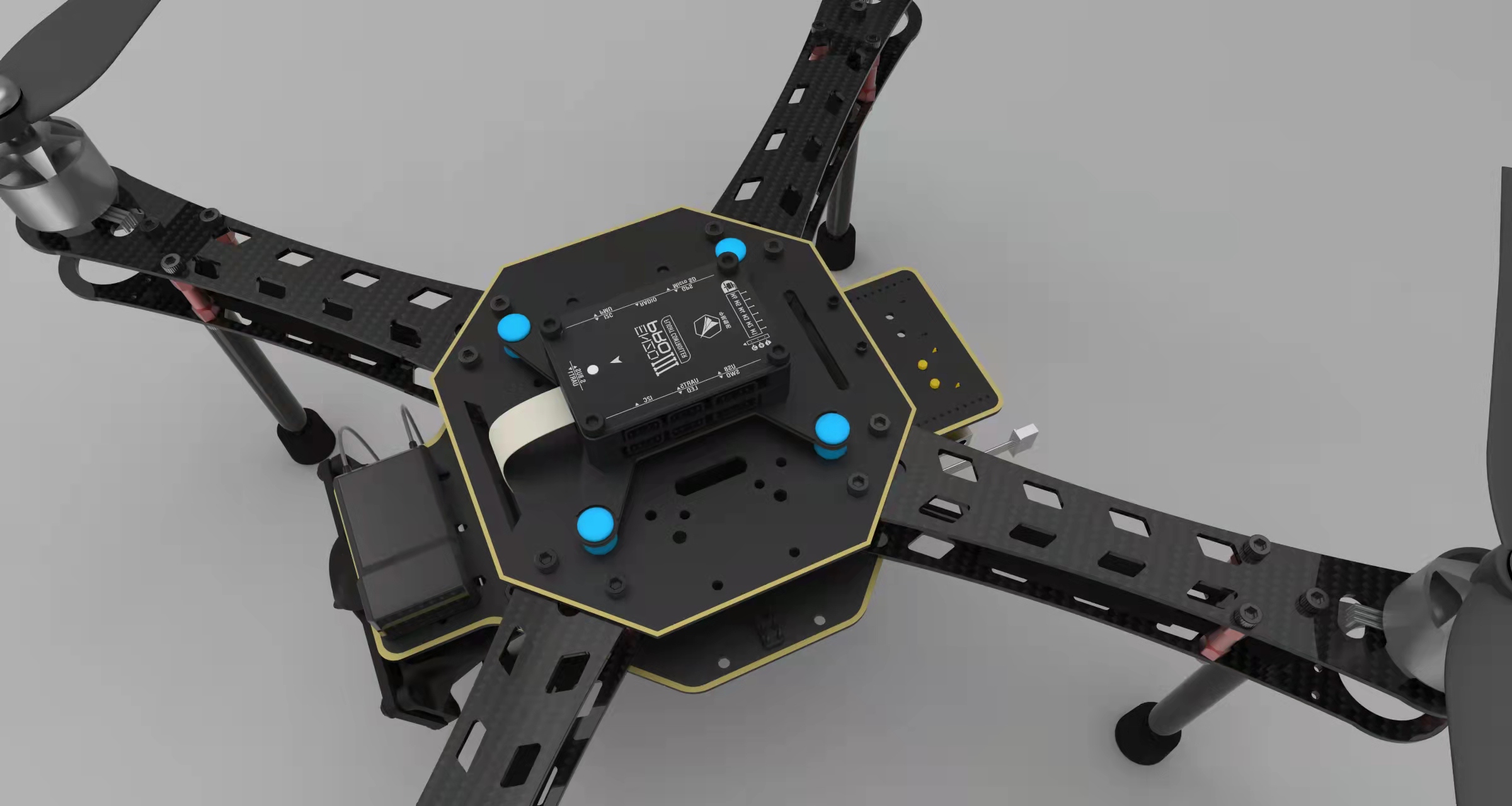
Owl是专为科研工作者与航天器开发者打造的小型化无人机开发平台,它搭载VisDrone视觉模块,适用于无GPS环境下基于视觉的无人机定位/导航/避障算法的验证与开发,以及室内无人机组网编队的研究。Owl拥有自主的双目传感器和开发平台,平台支持ROS接口,提供了6核CPU和5Tops TPU计算资源。同时预装了融合了港科大的VINS_Fusion VIO算法的自定位系统,可以满足室内无人机定位需求。同时提供了EGO-Planner视觉避障算法,可以提供视觉避障功能。

背景
无人机要实现自动避障飞行,需要以下这些技术支持。首先能够通过传感器、云端控制、摄像头这样的闭环等实现自我定位(Localization)。其次,依靠计算机视觉对环境进行检测,分析周围环境的特征,实现环境建图(Mapping)和避障(Obstacle Avoidance)的规划路径,就像人看到障碍物知道绕道那样。但是要在低空或者室内等环境下实现自动避障飞行,面临的技术挑战远比汽车/机器人场景要大。随着这些年来,相关算法研究的涌现和成熟,使我们看到复杂场景下的无人机自动避障飞行接近成熟,而且科研人员也越发需要一款稳定的飞行平台来实验各种SLAM,Swarm等算法。

首先,四旋翼无人机准确的定位是实现避障、路径规划以及编队等各种复杂任务的基础和前提。四旋翼无人机的位姿估计和定位精度和鲁棒性,也决定着其他依赖算法的效果好坏。目前广泛应用的定位方法有两类:一类是基于四旋翼无人机自带传感器,比如视觉/激光,从而获得精确的位置信息;另一类是基于外部设备提供精确的位置信息,如全球卫星定位系统,光学动作捕捉系统。光学动作捕捉系统拥有高分辨率的摄像头,可以亚毫米级追踪一个或多个无人机的位姿。近几年,很多研究人员通过光学动作捕捉系统实现了四旋翼无人机的运动估计,并通过光学动作捕捉系统实现了多旋翼无人机的暴力操作,倾斜墙面上的停靠,以及物体抓取。光学动作捕捉系统适用在实验室、研究室这种研究场所,在科研阶段非常适用。同样,利用全球卫星定位系统实现定位的方法也有明显缺陷,因为在建筑物密集、室内、隧道等地方GPS定位几乎是完全失效的。依赖激光传感器的定位系统目前普遍用于车载和机器人领域,但是由于其价格和重量限制,很难用于室内无人机系统。综上所述通过视觉SLAM方法提供运动控制所需的准确位置信息有着更大的应用价值。

我们这里提供的基于双目的开源VINS_fusion定位算法,是目前流行的VIO算法之一。它很好地融合IMU数据和双目视觉匹配定位算法:IMU预估计一方面提升了定位的精度,另一方面也加速了视觉匹配算法的效率。而且,IMU预估计也提升了整体算法的鲁棒性,即使视觉短期失效的情况下,也可以保证定位系统正常运行。VisBot模块通过提供精准的双目图像和IMU数据,使得Owl无人机可以实现稳定悬停和精准走位。
其次,在定位的基础上,无人机还需要实现视觉建图和避障规划等功能。和汽车和机器人相比,无人机场景需要的是三维地图和路径规划,算法的复杂度和灵敏度要求更高。目前学术界有各种建图和避障算法,这些算法性能和效果追求不一,但输入一般依赖于视觉的深度图,或者激光的点云图。VisBot模块提供了双目图像处理后的深度图信息,结合VIO定位,用户可以开发自己的避障算法。做为参考,VisBot模块也提供了开源的ego_planner框架,它是基于voxel地图和AStar路径规划算法,这些用户可以自行修改。VisBot添加了简单控制接口,修改后的框架可以控制飞机进行避障实验。

科技型企业是亟需科技型人才的,但是一些中小型科技型企业的财力、物力不足以支撑请高校博士来做全职技术研发。所以企业技术需求与科技人才的有效对接是一件非常有意义的事情;是帮助企业快速成长,高校人才技术落地的有效途径。
科研院所、高校组织科技人员服务企业,采取多种方式,支持科技人员通过兼职创新、长期派驻、短期合作等服务企业,可以有效帮助中小型科技且快速成长。发挥科研院所、高校创新人才培养示范基地学科交叉、设施完备、人才丰富的优势,为产业融合发展、转型升级和企业复杂技术难题破解提供专业化、集成化、个性化的解决方案。
欢迎高校、科研单位老师沟通,我们一同将AI视觉无人机推向行业应用,在行业应用中解决实际问题。
计划推进的行业应用,均为无GPS、或GPS信号缺失的应用场景:
1、 大型炉壁裂缝巡检
2、 井下电缆巡检
3、 大型仓库巡检
4、 桥梁巡检
AI视觉无人机应用场景还有很多,欢迎大佬们沟通探讨。